")
The Proteus project is developing innovative approaches for underwater networking and the sharing of data with users on the surface.
Naval operations are increasingly networked. Initiatives like the US Navy’s Project Overmatch plan to connect all naval platforms, weapons, sensors, bases and personnel. This aims to improve situational awareness, and command and control. Such postures, it is hoped, will help overcome adversarial Anti-Access/Area Denial (A2AD) postures by discovering exploitable gaps in the A2AD architectures.
Networking to this extent is a daunting and hitherto untried prospective and is challenging in the naval domain where subsurface and surface assets must be carefully linked. Radio Frequency (RF) communications work well above water but less so below the waves. Salt water is a poor conductor of the electromagnetic energy constituting a radio wave. This can be ameliorated using certain frequencies. Very, Super and Extremely Low Frequencies (VLF: 300 hertz/Hz to 30 kilohertz/KHz, SLF: 30Hz – 300HZ, ELF: three to 30Hz) penetrate several metres underwater. These frequencies need huge shore-based antennas hundreds of metres or more in length. Subsurface vehicles like submarines unwind extremely long antennas to receive traffic on these frequencies. This is not practical for small platforms like Autonomous Underwater Vehicles (AUVs).
Moreover, the quantities of traffic handled by VLF, SLF and ELF is very small. An ELF transmission typically provides data at speeds of ten kilobits-per-second. Contrast this with average global cellular connection speeds of 20.4 megabits-per-second and one sees the limitations. Such data rates and frequencies are unsuitable for AUVs collecting and sharing detailed pictures of the seabed for example.
Meeting the Challenge
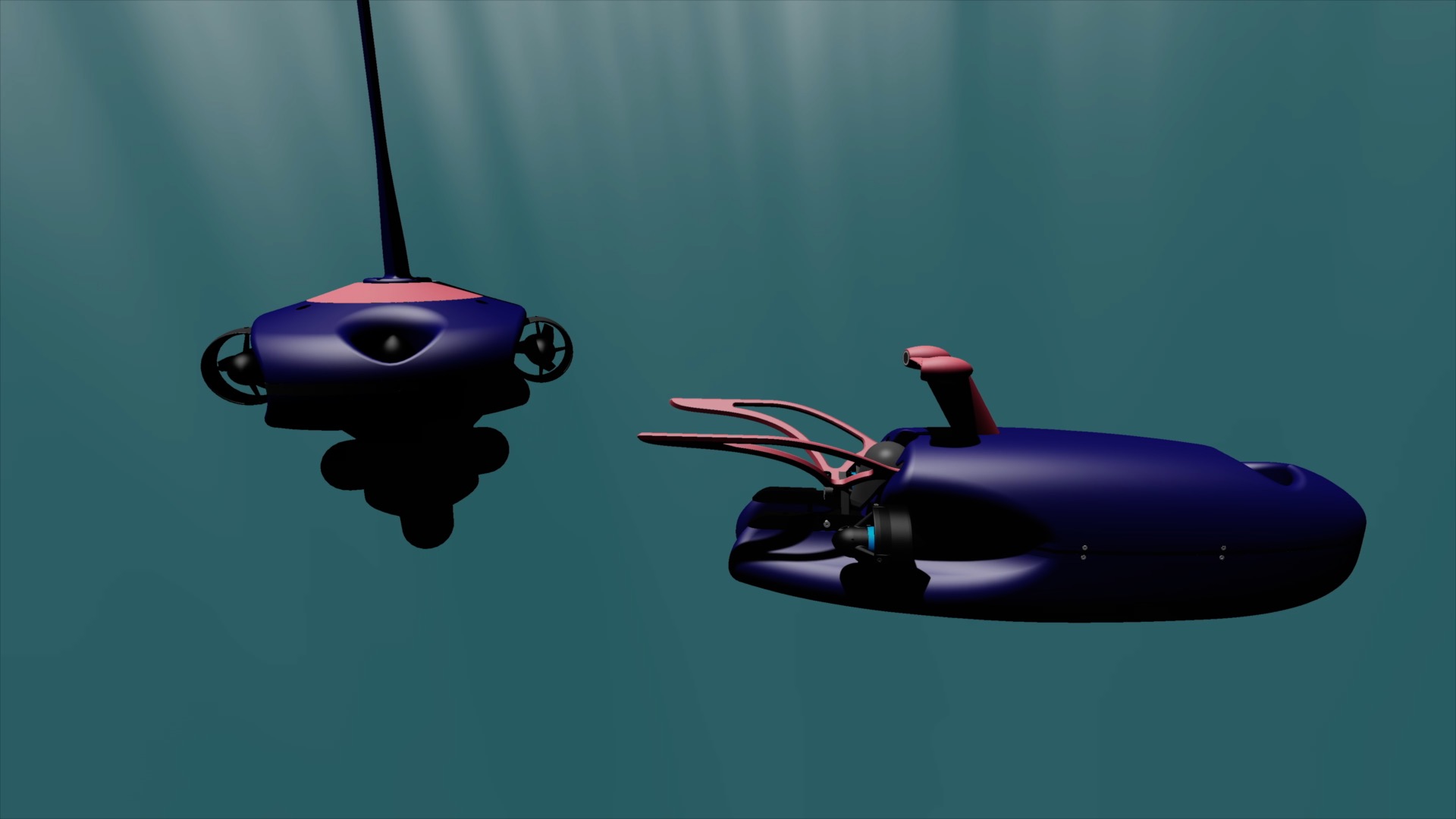
How can these limitations be overcome? France’s Proteus project has found the answer. Proteus involves Arkeocean, the École Nationale Supérieure de Techniques Avancées (ENSTA/National Superior School for Advanced Techniques) in Brest on France’s northwest coast and the Direction Générale de l’Armement (DGA/General Armaments Directorate), the country’s defence procurement agency. Proteus has a simple raison d’être. A large passive sonar antenna is “formed from a swarm of AUVs that silently drift with the current,” says Tamara Brizard, Arkecoean’s director. The sea element of Proteus’ architecture comprises the Inca and Maya AUVs.

Inca collects and stores acoustic recordings. Maya docks with Inca, receive the recordings before returning to the surface. Once there Maya uses its antennas to transmit these recordings using conventional radio or Satellite Communications (SATCOM). Alongside the acoustic data Maya transmits precise details of Inca’s location. As the project’s official literature notes this lets users plan and execute the swarmed Inca AUVs’ area of coverage.
The challenge for Ms. Brizard and her team in realising Proteus was keeping underwater communications to a minimum. Data collected by the Incas must be “transferred back to a command centre as often as possible without disrupting their ongoing collection of data.” This “presented a challenge as the amount and sensitivity of data being collected couldn’t just be transferred to the surface via acoustics.”
The Maya AUV solves this problem. Docking with the Incas, the latter transmits its data to Maya using a wifi connection. Ms. Brizard says wifi works underwater over a couple of centimetres’ range. Acoustics help Maya navigate to, and dock with, the Inca. Once on the surface, Maya sends the acoustic data to the command centre across a 2.4 gigahertz radio link. In the future, this link could be supplemented by SATCOM and customers can integrate their own links for surface transmission if desired.
Moving Forward
The Proteus project is ongoing and should conclude in 2023. The first phase of sea trials occurred in mid- 2021. Maya-Inca docking has been validated as have sonar capabilities. New AUVs are under construction for use in next year’s demonstration. Ms. Brizard and her colleagues “hope Proteus is a stepping-stone to more swarm AUV projects with the DGA involving more vehicles and operational models.” She says Proteus underlines that “even with big swarms of AUVs, complex operational models, and large amounts of data needing to be transferred, you can keep communications underwater to a minimum.” Arkeocean is currently “in talks to see what the next step for the project should be.”
by Dr. Thomas Withington











